



ラットの線条体でロボットに使われるアルゴリズムを確認

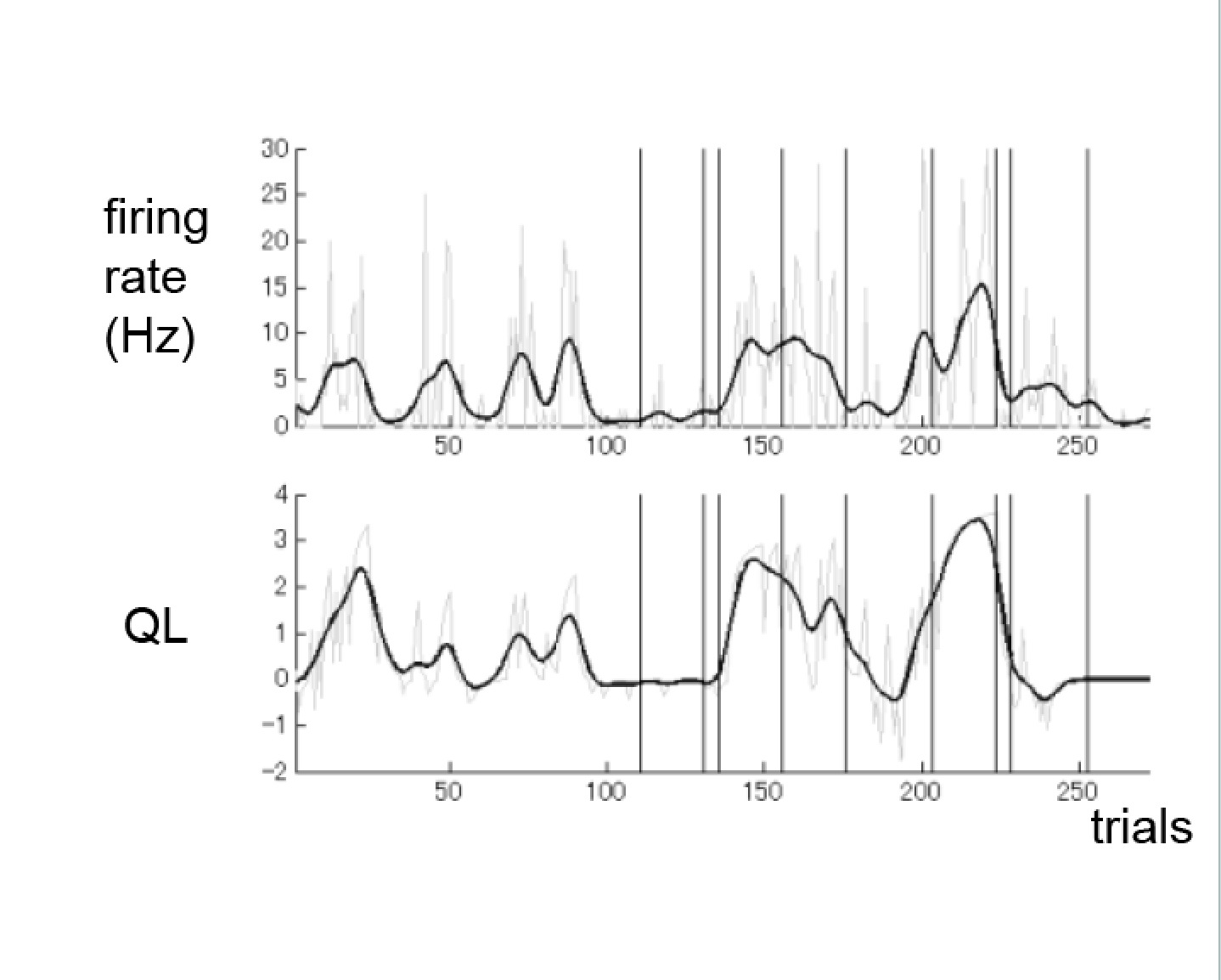
左右を選択する直前の、ある背外側線条体細胞の発火頻度は(上図)、各試行で変化する左の行動価値(下図:左の穴を選択することにより得られるであろう利益。ラットの行動をもとにアルゴリズムを用いて推定された)と一致していました。この結果は、適応ロボットに用いられているアルゴリズムとよく似た「行動価値」の学習がラットの神経細胞でも行われていることを示唆しています。
日付:
2015年2月26日
Copyright OIST (Okinawa Institute of Science and Technology Graduate University, 沖縄科学技術大学院大学). Creative Commons Attribution 4.0 International License (CC BY 4.0).
タグ
Research
シェア:









{kind=link}