



2020年2月26日
二足歩行のために進化した足

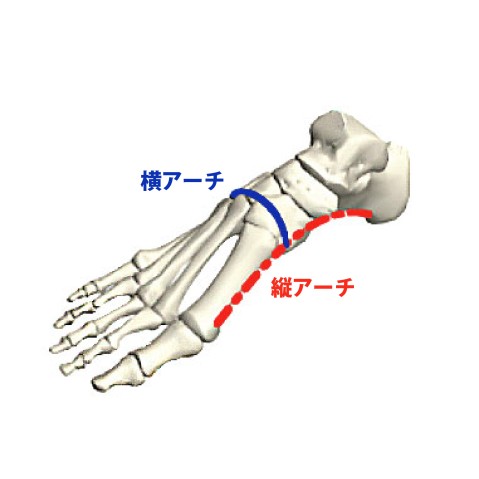
私たちにとっては当たり前のように見える自分の足ですが、バイオメカニクスの視点で見てみると、この足は、相当困難な仕事をしてくれているのです。足の親指の付け根を使って体を押し出す時、足には体重よりも大きな力がかかり、そのため足の中央部分は湾曲します。それでも足はこの強大な力に耐える十分な強度があるためその形状を維持することができます。この度科学誌Natureに発表された新たな研究では、あまり研究されていなかった「横アーチ」と呼ばれる足の中央を横切る部分の重要性に注目しました。
「人間の足がどのように機能するかをきちんと理解すると、様々な応用ができます。」と、沖縄科学技術大学院大学(OIST)の非線形・非平衡物理ユニットで研究を率いているマヘッシュ・バンディ准教授は語ります。 例えば扁平足による障害の現在の定義は、よく研究されている縦方向の「縦アーチ」のみに基づいており、横方向の横アーチを考慮していない、とバンディ准教授は説明します。さらに今回の研究は、ロボットの足の設計にも役立ち、また、二足歩行がどのように進化したかについての手がかりも得られる、としています。
従来の研究では、足の剛性の25%が縦アーチによることがわかっています。研究者らは、フロッピーディスクを丸めると、丸めた方向に対して垂直方向には曲げにくくなるのと同様に、横アーチがこの効果にさらに貢献すると理論付けました。そしてこの度、コンピュータ・シミュレーションで開発されたプロトコル及びプラスチックモデルとメカニカルモデルの実験を使用し、ヒトの足の剛性の約半分が横アーチによって制御されることを見出しました。
ヒトの足における剛性の測定
足の中央部分(ミッドフット)における剛性に影響を与えるものを判断するため、バンディ准教授と共同研究者らは、ミッドフットのコンピュータ・シミュレーションとプラスチックモデルの両方を作成し、一定量曲げるのに必要な力を測定しました。
「より顕著な横アーチを備えたプラスチックモデルとシミュレーションでは、より平坦な足のモデルよりも剛性が高く、曲げの影響を受けにくいことがわかりました。逆にこれらのモデルでは、縦アーチの曲率を増加させても、剛性にほとんど影響しませんでした。」と、バンディ准教授は説明します。
その後、長さ、厚さ、横アーチ曲率が異なる足のメカニカルなモデルの曲げ試験を実施したところ、シミュレーションとプラスチックモデルの実験と同様、より顕著な横アーチを持つ足の模倣体を曲げようとすると、より剛性があることを発見しました。実験の最後に、献体された足において、縦アーチ組織をそのままにして足の横アーチ組織を切断すると、足の剛性が約半分に低下したことがわかりました。
人類の進化において
バンディ准教授と共同研究者らは、人類の進化において横アーチが果たした役割にも注目しました。これまでの研究で、ベルベットモンキー、マカク、チンパンジー、ゴリラの足は、人間の足よりもかなり平らで、部分的にしかヒトの足のような剛性がないことが知られています。一方、私たちのようなヒト属内の種はすべて、顕著な横アーチを持ち、効果的なウォーキングやランニングが可能です。
バンディ准教授と同僚は、人間と人間以外の霊長類の横アーチの曲率を、初期のヒト属の化石と比較することで、化石の記録の中でも顕著な横アーチがどこで最初に出現したかを調べました。「ヒトのような横アーチは、ヒト属出現の150万年以上前に現れ、現代のヒトの進化における重要な局面であったことがわかりました。本研究結果は、縦アーチばかりでなく、横アーチも分析する必要があることを示しています。」と、准教授は語っています。
本研究は、バンディ准教授、イエール大学のMadhusudhan Venkadesan教授、ワーウィック大学のShreyas Mandre教授によって共同で主導され、ヒューマンフロンティア・サイエンスプログラムの若手研究者助成金による資金提供を受けました。





