



cnru FY2022 Annual Report 02

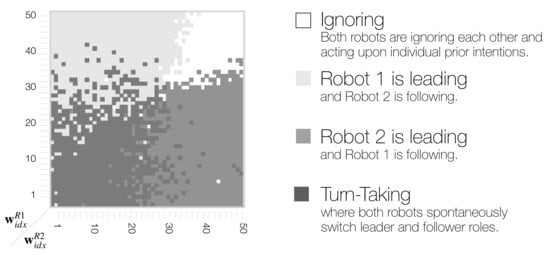
Figure 1. Schematic of phase space structure indicating four distinct types of behavior coordination in dyadic robot interaction context.
Date:
14 March 2024
Copyright OIST (Okinawa Institute of Science and Technology Graduate University, 沖縄科学技術大学院大学). Creative Commons Attribution 4.0 International License (CC BY 4.0).
Share on:









{kind=link}