



ncu Annual Report 2014 13

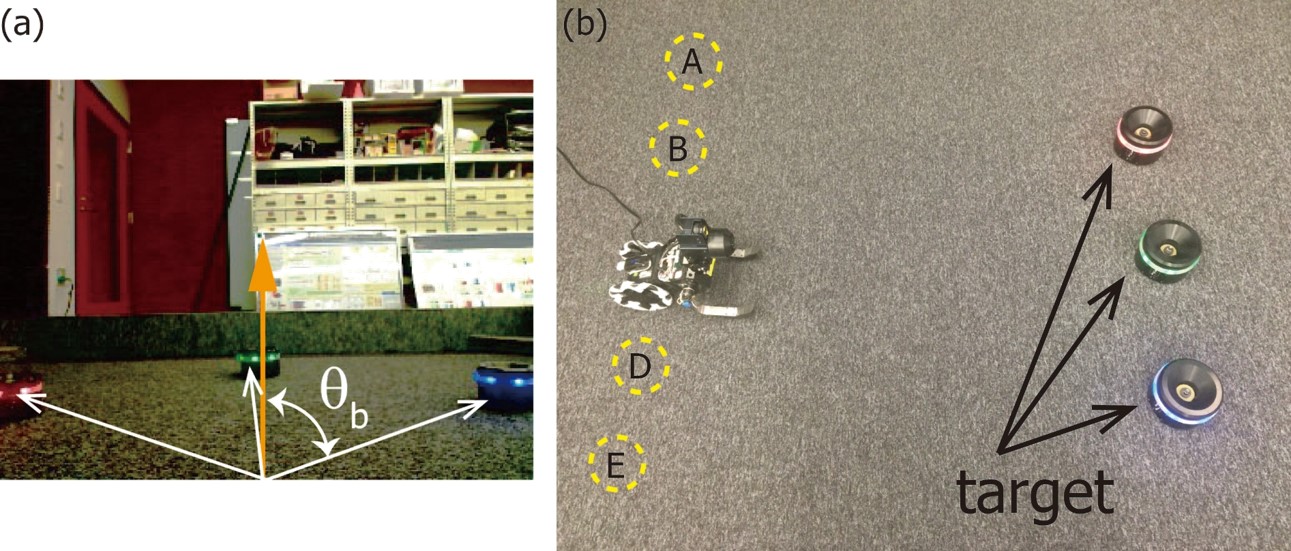
Figure 3.3.1: Vision based navigation task. (a): Image captured by the robot. (b): Environment where there exist three visual landmarks and five starting positions.
Date:
05 March 2024
Copyright OIST (Okinawa Institute of Science and Technology Graduate University, 沖縄科学技術大学院大学). Creative Commons Attribution 4.0 International License (CC BY 4.0).
Share on:









{kind=link}