



cnru FY2020 Annual Report 02

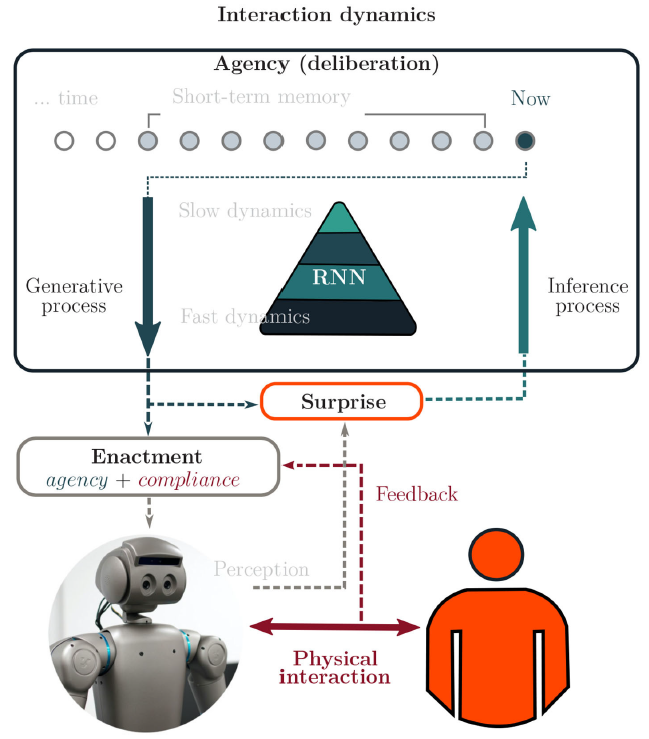
Figure 1:Control is shared in the interaction based on the individuals' capacities of enacting agency and compliance. The capacity of agency is studied through the optimization of free energy (surprise) in short-term memory of direct perception. Hence, from the robot's unique past, an intended future is reinterpreted in the hierarchical RNN for deliberation control and projected in the perceptual space. The capacity of motor compliance is modulated as a proportional integral (PI) control scheme for automatic adjustment of the body to the actions induced by the partner.
Date:
14 March 2024
Copyright OIST (Okinawa Institute of Science and Technology Graduate University, 沖縄科学技術大学院大学). Creative Commons Attribution 4.0 International License (CC BY 4.0).
Share on:









{kind=link}