



Cognitive Neurorobotics Research Unit
Professor Jun Tani

Abstract
CNRU started in September 2017. Currently CNRU consists of 4 postdoc researchers, one technical stuff, 5 Ph.D. students, and one administrator. The group is investigating the essential mechanisms on human embodied cognition by using frameworks of predictive coding, active inference, and model-based reinforcement learning while conducting various robotics experiments.
1. Staff
-
As of March 31, 2020
- Prof. Jun Tani, Professor
- Dr. Takazumi Matsumoto, Postdoctoral Scholar
- Dr. Fabien Benureau, Postdoctoral Scholar
- Dr. Hendry Ferreira Chame, Postdoctoral Scholar
- Dr. Jeffrey Queißer, Postdoctoral Scholar
- Mr. Siqing Hou, Technical Staff
- Mr. Dongqi Han, PhD Student
- Ms. Nadine Wirkuttis, PhD Student
- Mr. Wataru Ohata, PhD Student
- Mr. Prasanna Vijayaraghavan, PhD Student
- Mr. Vsevolod Nikulin, PhD Student
- Mr. Munenori Takaku, Rotation Student
- Dr. Jeffrey White, Visiting researcher (Assistant Professor, University Twente)
- Dr. Shingo Murata, Visiting researcher (Assistant Professor, National Institute of Informatics Graduate University for Advanced Studies)
- Ms. Tomoe Furuya, Research Unit Administrator
2. Collaborations
2.1 Computational models on reinforcement learning
- Description: Model studies on hierarchical, model-based, variational reinforcement learning.
- Type of collaboration: Joint research
- Researchers:
- Prof. Kenji Doya, Neural Computation Unit, OIST
2.2 Investigation on choking effects in active inference during sport performance
- Description: We investigate possible neural mechanisms of choking effects observed in various sport performances based on framework of active inference.
- Type of collaboration: Joint research
- Researchers:
- Prof. M. L. Cappucio, Univ. of New South Wales
3. Activities and Findings
3.1 Cognitive and motor compliance in intentional human-robot interaction
It has been considered that embodiment and subjective experience in human-robot interaction are important aspects to consider when studying both natural cognition and adaptive robotics to human environments. Although several researches have focused on nonverbal communication and collaboration, the study of autonomous physical interaction has obtained less attention. From the perspective of neurorobotics, this study investigates the relation between intentionality, motor compliance, cognitive compliance, and behavior emergence. The study proposes a variational model inspired by the principles of predictive coding and active inference to study intentionality and cognitive compliance, and an intermittent control concept for motor deliberation and compliance based on torque feed-back. The experiments performed with the humanoid Torobo portrait interesting perspectives for the bio-inspired study of developmental and social processes.

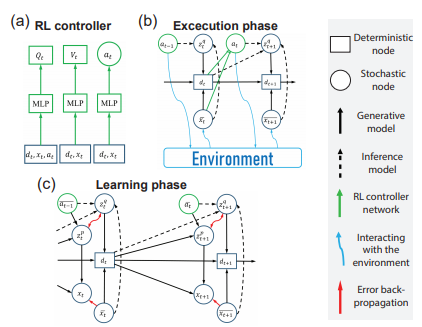
3.2 Variational recurrent models for solving partially observable control tasks
It has been known that in partially observable (PO) environments, deep reinforcement learning (RL) agents often suffer from unsatisfactory performance, since two problems need to be tackled together: how to extract information from the raw observations to solve the task, and how to improve the policy. This study proposes an RL algorithm for solving PO tasks. Our method comprises two parts: a variational recurrent model (VRM) for modeling the environment, and an RL controller that has access to both the environment and the VRM. The proposed algorithm was tested in two types of PO robotic control tasks, those in which either coordinates or velocities were not observable and those that require long-term memorization. The experiment results show that the proposed algorithm achieved better data efficiency and/or learned more optimal policy than other alternative approaches in tasks in which unobserved states cannot be inferred from raw observations in a simple manner.
3.3 Active Inference and the Choking effects during sport performances
Choking effect (choke) is the tendency of expert athletes to underperform in high-stakes situations. The current study proposes an account of choke based on active inference -- a corollary of the free energy principle in cognitive neuroscience. The active inference scheme can explain certain forms of sensorimotor skills disruption in terms of precision-modulated imbalance between sensory input and higher level predictions. This model predicts that choke arises when the system fails to attenuate the error signal generated by proprioceptive sensory input. The study aims to expand the previous formulations of this model to integrate the contribution of other causal factors, such as confidence erosion, taking into account the empirical evidence emerging from the psychological research on performance disruption in sports. An expanded model allows us to unify the two main theories of performance disruption in the sport psychology literature, i.e. the self-monitoring/execution focus theory and the distraction/ overload theory, while recognizing that the typical manifestations of choke in sport competitions are best accounted for by self-monitoring/ execution focus theory. The study illustrates how active inference explains some experiential aspects of choke that are familiar to sport psychologists and practitioners: choke is a skill-level specific phenomenon; alleviated by ritual-like pre-performance routines; aggravated by personal and contextual factors such as self-confidence erosion and performance anxiety; accompanied by a drop in the attenuation of the sense of agency normally associated with high performance and flow states.
4. Publications
4.1 Journals
- White J. The role of robotics and AI in technologically mediated human evolution: a constructive proposal. AI & Society, 35, 177–185 (2020). (individual contribution by White J., visiting researcher.)
- Cappuccio, M. L., Kirchhoff, M. D., Alnajjar, F., & Tani, J. Unfulfilled Prophecies in Sport Performance: Active Inference and the Choking Effect. Journal of Consciousness Study. 27(3-4), 152-184. (2020).
- Ahmadi, A., & Tani, J. A Novel Predictive-Coding-Inspired Variational RNN Model for Online Prediction and Recognition. Neural Computation, 31, 2025–2074 (2019).
4.2 Books and refereed conference proceedings
- Han, D., Doya, K., & Tani, J. Variational recurrent models for solving partially observable control tasks. Accepted for presentation in ICLR 2020. arXiv preprint arXiv:1912.10703v2 (2020).
- Chame H. F., & Tani, J. Cognitive and motor compliance in intentional human-robot interaction. Accepted for presentation in IEEE ICRA 2020. arXiv preprint arXiv:1911.01753v3 (2020).
- Jung, M., Matsumoto, T., & Tani, J. Goal-Directed Behavior under Variational Predictive Coding: Dynamic Organization of Visual Attention and Working Memory. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Macau, China, November 4-8, 2019. 1040-1047 (2019).
4.3 Invited seminars and talks
- Tani, J. A Proposal of a Novel Variational Bayes Recurrent Neural Network Model Under Predictive Coding and Active Inference Frameworks. Consciousness Club Tokyo, Tokyo, Japan, February 7 (2020).
- Tani, J. Cognitive Neurorobotics Study Using Frameworks of Predictive Coding and Active Inference. BMW Group, Munich, Germany, December 18 (2019).
- Tani, J. Actions, Symbols and Selves as Self-Organizing Dynamic Phenomena: a View from Neurorobotics study. CHAIN INTERNATIONAL SYMPOSIUM Adventures in Consciousness Science: Exploring the Crossover between Philosophy, Neuroscience, AI, and Robotics, Sapporo, Japan, November 10 (2019).
- Tani, J. An account of the development of cognitive minds using predictive coding and active inference frameworks. ATR Brain Information Communication Research Laboratory Group Symposium, Kyoto, Japan, October 30 (2019).
- Tani, J. Accounting social cognitive mechanisms by the framework of predictive coding and active inference: a synthetic experimental study using robotics interaction platforms. Keynote speech, 7th International Conference on Human-Agent Interaction (HAI2019), Kyoto, Japan, October 8 (2019).
- Tani, J. Emergence in Neurorobotics Experimental Studies. Riken Robotics Retreat, Kyoto, Japan, September 13 (2019).
- Tani, J. ロボット構成論的アプローチで考える身体的自己と物語的自己について, 第19回Kフォーラム, Takayama, Japan, August 22-24 (2019).
- Tani, J. How can compositionality develop through self-exploration and supervised tutoring? Fourth International Workshop on Intrinsically-Motivated Open-ended Learning (IMOL2019), Frankfurt, Germany, July 1-3 (2019).
- Tani, J. Generating goal-directed planning images using frameworks of predictive coding and active inference: Agency and object constancy. NII Shonam Meeting, Language as Goal-Directed Sequential Behavior: Computational Theories, Brain Mechanisms, Evolutionary Roots, Shonan, Japan, May 21 (2019).
- Tani, J. Accounts of the development of embodied cognition using predictive coding and active inference frameworks. Marcus Wallenberg International Symposium on Affective and Developmental Processes in Cognitive and Autonomous Systems - Augmenting Deep Learning using Neural Dynamics and Predictive Coding, Gothenburg, Sweden, May 6 (2019).
- Tani, J. Cognitive neurorobotics studies using the framework of predictive coding and active inference. NCM2019 Satellite Meeting, Toyama Japan, April 22-23 (2019).
5. Intellectual Property Rights and Other Specific Achievements
Nothing to report
6. Meetings and Events
6.1 Seminars
Seeing is believing
- Date: October 24, 2019
- Venue: OIST Campus Lab 1, D015
- Speaker: Dr. Ares Fiser (Friedrich Miescher Institute for Biomedica Research (FMI))
Intention sharing based on shared goals and work learning: Social-Pragmatic Perspective to language development
- Date: June 18, 2019
- Venue: OIST Campus Lab 1, C016
- Speaker: Prof. Harumi Kobayashi (Tokyo Denki University)
6.2 Events
Nothing to report.
7. Other
Nothing to report.